Zhouheng Li
I am currently a 4th-year Ph.D. student in the College of Control Science and Engineering at  Zhejiang University , Hangzhou, China, under the supervision of Prof. Lei Xie and Prof. Hongye Su. I was previously advised on energy model-based composition by Prof. Yilun Du from Harvard University. I am now collaborating closely on car racing-related research with Dr. Mattia Piccinini and Dr. Baha Zarrouki from the AVS Lab, Technical University of Munich (TUM).
Zhejiang University , Hangzhou, China, under the supervision of Prof. Lei Xie and Prof. Hongye Su. I was previously advised on energy model-based composition by Prof. Yilun Du from Harvard University. I am now collaborating closely on car racing-related research with Dr. Mattia Piccinini and Dr. Baha Zarrouki from the AVS Lab, Technical University of Munich (TUM).
I am currently visiting the AutoMan Lab at  Nanyang Technological University (NTU) since May 2026, focusing on VLA-enhanced multi-agent game planning for autonomous racing, under the supervision of Prof. Chen Lv.
Nanyang Technological University (NTU) since May 2026, focusing on VLA-enhanced multi-agent game planning for autonomous racing, under the supervision of Prof. Chen Lv.
✨ Enjoyments of life: 🎾 tennis, 🎹 piano, 🎲 board games (Seven Wonders: Duel, Splendor, etc), hiking, ping-pong, traveling. 🚀 I am on the job market now! Please contact me if you have any relevant positions or opportunities (📨 zh_li@zju.edu.cn).
🎯 Research
My research focuses on developing embodied robots that can make intelligent decisions and plan effectively in highly dynamic scenarios, particularly when operating at the limits of handling (📝 Publications). To this end, I actively integrate physics-informed generative models with model-based approaches, such as Model Predictive Control (MPC) and Model Predictive Path Integral (MPPI). Currently, I am especially interested in planning strategies for autonomous car racing and drone racing, with a focus on the following directions:
⭐ Game Planning for Competitive Multi-Agent Interaction: Game theory provides a principled framework for strategic interaction, but computational cost and transition safety limit its practical use. My research combines generative priors with game-theoretic reasoning to enable efficient computation and safe transitions between strategies in complex interactive environments.
⭐ Physics-Informed World Models and VLAs: A key limitation of current world models and VLAs is that their predictions and decisions often lack essential physical consistency. Integrating physics-informed neural networks (PINNs) into world models and VLAs can improve prediction consistency and action feasibility, enabling more robust long-horizon behavior.
⭐ Multimodal Generative Models: Integrating diverse sensory modalities while balancing multiple objectives remains challenging for robotic systems. This direction focuses on leveraging energy-based models and classifier-free guidance to enable flexible composition of image and state modalities at inference time, supporting efficient adaptation and strong few-shot and zero-shot generalization.
If any of these topics caught your interest, feel free to drop me emails. I enjoy collaborating on interesting projects and making amazing things happen together!
✨ Highlights
These demos highlight the effectiveness of my research across a range of challenging tasks. Click the buttons below to explore each project in more detail!
Multi-Behavior Autonomous Racing
 replay replay
replay replay Vision-based Drone Racing
 replay replay
replay replay Enhanced Velocity Optimization for Car Racing
Energy-Parameterized Diffusion Navigation
replay replay replay Physics-Informed World Model
replay replay replay replay 🔥 News
- [July 2026] 🔥🔥🔥 Our work on real-time planning for multi-vehicle racing is now available. The proposed framework enables diverse interactive behaviors, including defensive blocking, wheel-to-wheel racing, and opportunistic overtaking, with smooth and safe strategy transitions.
- [July 2026] 🎉🎉🎉 Our work on rapid and safe trajectory planning (RSTP) in unseen dynamic environments through energy-parameterized diffusion composition has been accepted to IECON2026.
- [July 2026] 🎉🎉🎉 We are excited to share that our paper on compositional diffusion models for autonomous drone racing has been accepted to an RSS 2026 workshop: Diffusion for Robot Learning ! Our approach enables drones to generalize to previously unseen race tracks without track-specific retraining. Please feel free to reach out and connect with us (location: CB07.02.025)!
- [June 2026] 🎉🎉🎉 Our vision-based drone racing work using neural signed distance fields and MPPI is accepted by IROS 2026 .
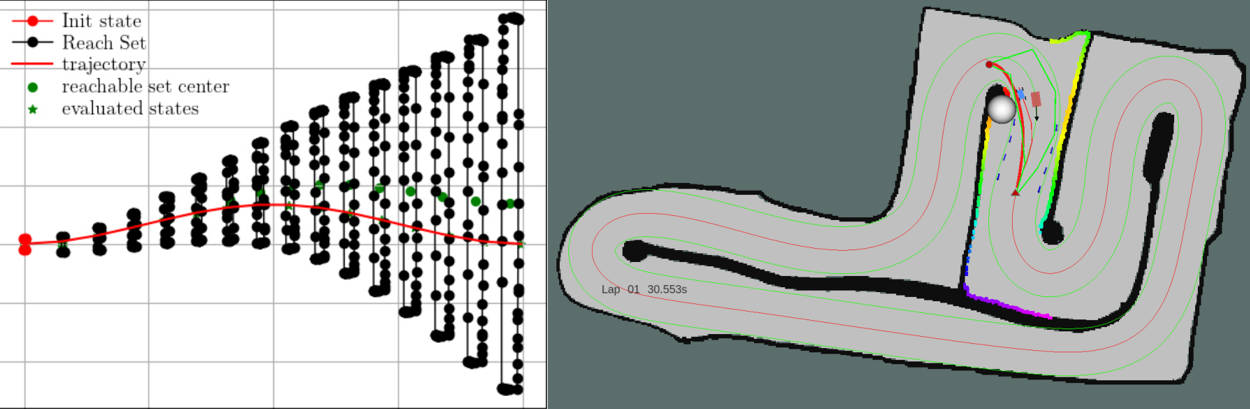
- [May 2026] 🎉🎉🎉 Our paper about spatio-temporal topology and reachable set analysis enhanced overtaking trajectory planning framework is accepted by the Journal IET Intelligent Transport Systems .
- [Jan. 2026] 🔥🔥🔥 Our work on Enhanced Velocity Optimization MPCC (EVO-MPCC) is available, and the corresponding implementation has been released.
Older news
- [Sep. 2025] 🔥🔥🔥 I have released the implementation of RITP and RSTP-MPC .
- [Jan. 2025] 🎉🎉🎉 Our paper about data-driven aggressive autonomous racing framework using velocity prediction MPCC and Bayesian optimization is accepted by ICRA 2025 .
- [Nov. 2024] 🔥🔥🔥 I have released the CiMPCC , a local trajectory planner for autonomous racing.
- [Sep. 2024] 🎉🎉🎉 Our paper about rapid and safe trajectory planning for automated parking (RITP) using path-velocity decomposition is accepted by the Journal Robotics and Autonomous Systems .
- [Jul. 2024] 🎉🎉🎉 Our paper about Curvature-Integrated MPCC for autonomous racing is accepted by ITSC 2024 .
📝 Selected Publications
- * means equal contribution.
-
SGTP: Sampling-based Game-Theoretic Planning for Real-Time Multi-Vehicle Autonomous Racing
Zhouheng Li, Fangguo Zhao, Mattia Piccinini, Baha Zarrouki, Yuan Gao, Zitong Shan, Johannes Betz, Chen Lv, Lei Xie
None@misc{li2026sgtpsamplingbasedgametheoreticplanning, title={SGTP: Sampling-based Game-Theoretic Planning for Real-Time Multi-Vehicle Autonomous Racing}, author={Zhouheng Li and Fangguo Zhao and Mattia Piccinini and Baha Zarrouki and Yuan Gao and Zitong Shan and Johannes Betz and Chen Lv and Lei Xie}, year={2026}, eprint={2607.25388}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2607.25388}, } -
Compositional Diffusion Models for Autonomous Drone Racing
Fangguo Zhao*, Zhouheng Li*, Yunhao Luo, Hanbing Zhang, Xin Guan, Lei Xie, and Shuo Li
-
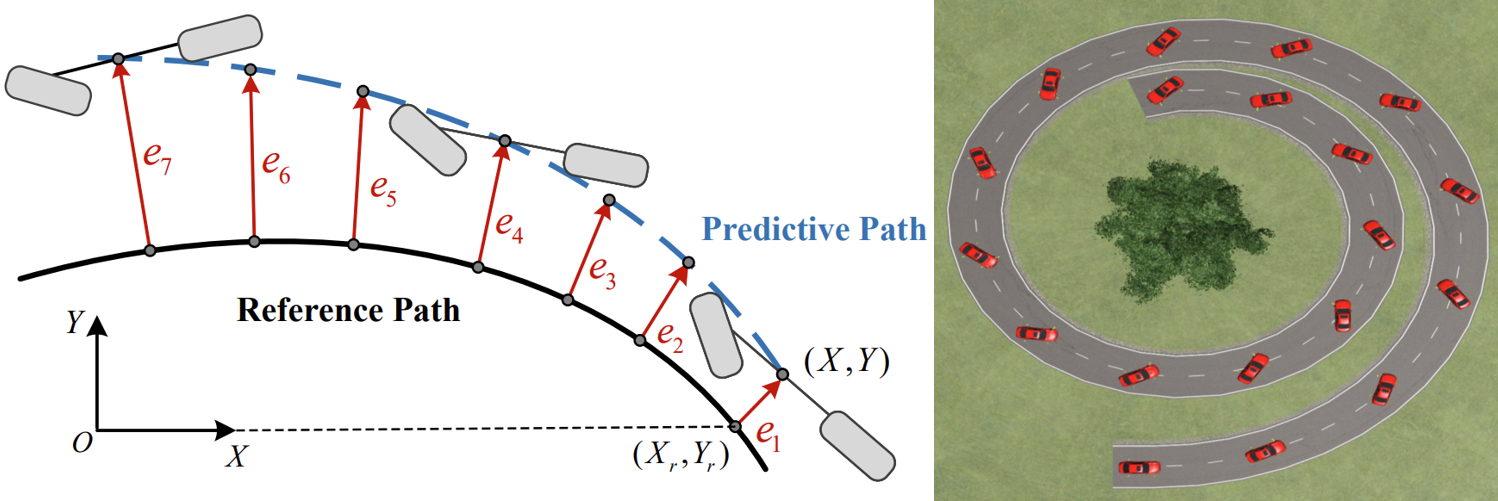
EVO-MPCC: Enhanced Velocity Optimization with Learning-Based Auto-Tuning for Real-Time Vehicle Trajectory Planning
Zhouheng Li, Bei Zhou, Mattia Piccinini, Cheng Hu, Baha Zarrouki, Rahul Mangharam, Lei Xie
Li Z, Zhou B, Piccinini M, et al. EVO-MPCC: Enhanced Velocity Optimization with Learning-Based Auto-Tuning for Real-Time Vehicle Trajectory Planning[J]. Available at SSRN 6127037.@article{li6127037evo, title={EVO-MPCC: Enhanced Velocity Optimization with Learning-Based Auto-Tuning for Real-Time Vehicle Trajectory Planning}, author={Li, Zhouheng and Zhou, Bei and Piccinini, Mattia and Hu, Cheng and Zarrouki, Baha and Mangharam, Rahul and Xie, Lei}, journal={Available at SSRN 6127037} } -
Vision-Guided MPPI for Agile Drone Racing: Navigating Arbitrary Gate Poses via Neural Signed Distance Fields
Fangguo Zhao, Hanbing Zhang, Zhouheng Li, Xin Guan, Shuo Li
-
A Data-Driven Aggressive Autonomous Racing Framework Utilizing Local Trajectory Planning with Velocity Prediction
Zhouheng Li, Bei Zhou, Cheng Hu, Lei Xie, Hongye Su
Li Z, Zhou B, Hu C, et al. A Data-Driven Aggressive Autonomous Racing Framework Utilizing Local Trajectory Planning with Velocity Prediction[J]. arXiv preprint arXiv:2410.11570, 2024.@INPROCEEDINGS{11128227, author={Li, Zhouheng and Zhou, Bei and Hu, Cheng and Xie, Lei and Su, Hongye}, booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)}, title={A Data-Driven Aggressive Autonomous Racing Framework Utilizing Local Trajectory Planning with Velocity Prediction}, year={2025}, pages={16657-16663}, doi={10.1109/ICRA55743.2025.11128227} } -
Reduce Lap Time for Autonomous Racing with Curvature-Integrated MPCC Local Trajectory Planning Method
Zhouheng Li, Lei Xie, Cheng Hu, Hongye Su
Li Z, Xie L, Hu C, et al. Reduce Lap Time for Autonomous Racing with Curvature-Integrated MPCC Local Trajectory Planning Method[C]//2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2024: 1066-1073.@inproceedings{li2024reduce, title={Reduce Lap Time for Autonomous Racing with Curvature-Integrated MPCC Local Trajectory Planning Method}, author={Li, Zhouheng and Xie, Lei and Hu, Cheng and Su, Hongye}, booktitle={2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC)}, pages={1066--1073}, year={2024}, organization={IEEE} } -
A rapid iterative trajectory planning method for automated parking through differential flatness
Zhouheng Li, Lei Xie, Cheng Hu, Hongye Su
Li Z, Xie L, Hu C, et al. A rapid iterative trajectory planning method for automated parking through differential flatness[J]. Robotics and Autonomous Systems, 2024, 182: 104816.@article{li2024rapid, title={A rapid iterative trajectory planning method for automated parking through differential flatness}, author={Li, Zhouheng and Xie, Lei and Hu, Cheng and Su, Hongye}, journal={Robotics and Autonomous Systems}, volume={182}, pages={104816}, year={2024}, publisher={Elsevier} } -
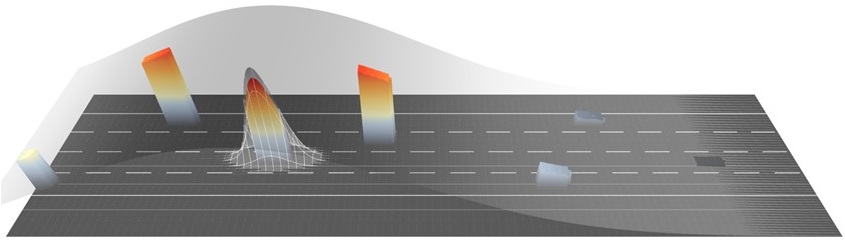
Rapid and Safe Trajectory Planning over Diverse Scenes through Diffusion Composition
Wule Mao, Zhouheng Li, Yunhao Luo, Fangguo Zhao, Lei Xie
Mao W, Li Z, Luo Y, et al. Rapid and Safe Trajectory Planning over Diverse Scenes through Diffusion Composition[J]. arXiv preprint arXiv:2507.04384, 2025.@article{mao2025rapid, title={Rapid and Safe Trajectory Planning over Diverse Scenes through Diffusion Composition}, author={Mao, Wule and Li, Zhouheng and Luo, Yunhao and Du, Yilun and Xie, Lei}, journal={arXiv preprint arXiv:2507.04384}, year={2025} } -
An Overtaking Trajectory Planning Framework Based on Spatio-temporal Topology and Reachable Set Analysis Ensuring Time Efficiency
Wule Mao, Zhouheng Li, Entao Sun, Lei Xie, Hongye Su
Mao W, Li Z, Xie L, et al. An overtaking trajectory planning framework based on spatio-temporal topology and reachable set analysis ensuring time efficiency[J]. arXiv preprint arXiv:2410.22643, 2024.@misc{mao2026overtakingtrajectoryplanningframework, title={An Overtaking Trajectory Planning Framework Based on Spatio-temporal Topology and Reachable Set Analysis Ensuring Time Efficiency}, author={Wule Mao and Zhouheng Li and Entao Sun and Lei Xie and Hongye Su}, year={2026}, primaryClass={cs.RO}, } -
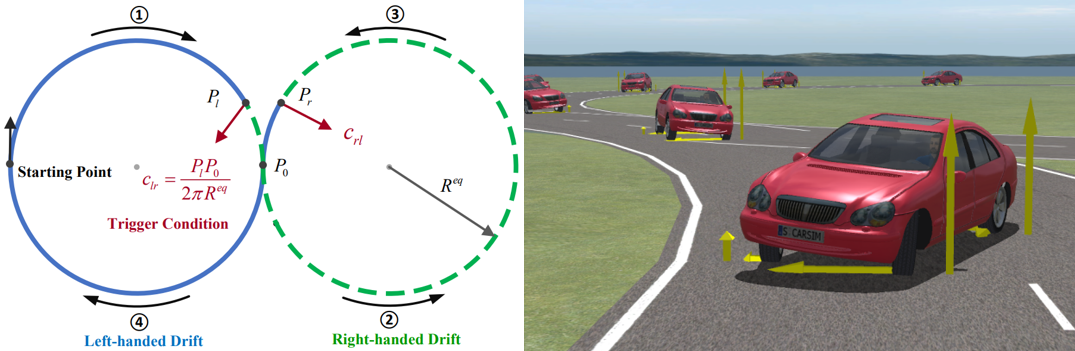
An aggressive cornering framework for autonomous vehicles combining trajectory planning and drift control
Wangjia Weng, Cheng Hu, Zhouheng Li, Hongye Su, Lei Xie
Weng W, Hu C, Li Z, et al. An aggressive cornering framework for autonomous vehicles combining trajectory planning and drift control[C]//2024 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2024: 2749-2755.@inproceedings{weng2024aggressive, title={An aggressive cornering framework for autonomous vehicles combining trajectory planning and drift control}, author={Weng, Wangjia and Hu, Cheng and Li, Zhouheng and Su, Hongye and Xie, Lei}, booktitle={2024 IEEE Intelligent Vehicles Symposium (IV)}, pages={2749--2755}, year={2024}, organization={IEEE} } -
Adaptive Learning-based Model Predictive Control Strategy for Drift Vehicles
Bei Zhou, Cheng Hu, Jun Zeng, Zhouheng Li, Johannes Betz, Lei Xie, Hongye Su
Zhou B, Hu C, Zeng J, et al. Adaptive learning-based model predictive control strategy for drift vehicles[J]. Robotics and Autonomous Systems, 2025: 104941.@article{zhou2025adaptive, title={Adaptive learning-based model predictive control strategy for drift vehicles}, author={Zhou, Bei and Hu, Cheng and Zeng, Jun and Li, Zhouheng and Betz, Johannes and Xie, Lei and Su, Hongye}, journal={Robotics and Autonomous Systems}, pages={104941}, year={2025}, publisher={Elsevier} } -
Enhancing Physical Consistency in Lightweight World Models
Dingrui Wang*, Zhexiao Sun*, Zhouheng Li, Cheng Wang, Youlun Peng, Hongyuan Ye, Baha Zarrouki, Wei Li, Mattia Piccinini, Lei Xie, Johannes Betz
Wang D, Sun Z, Li Z, et al. Enhancing Physical Consistency in Lightweight World Models[J]. arXiv preprint arXiv:2509.12437, 2025.@article{wang2025enhancing, title={Enhancing Physical Consistency in Lightweight World Models}, author={Wang, Dingrui and Sun, Zhexiao and Li, Zhouheng and Wang, Cheng and Peng, Youlun and Ye, Hongyuan and Zarrouki, Baha and Li, Wei and Piccinini, Mattia and Xie, Lei and others}, journal={arXiv preprint arXiv:2509.12437}, year={2025} } -
A Learning-based Planning and Control Framework for Inertia Drift Vehicles
Bei Zhou, Zhouheng Li, Lei Xie, Hongye Su, Johannes Betz
Zhou B, Li Z, Xie L, et al. A Learning-based Planning and Control Framework for Inertia Drift Vehicles[J]. arXiv preprint arXiv:2507.05748, 2025.@INPROCEEDINGS{11423578, author={Zhou, Bei and Li, Zhouheng and Xie, Lei and Su, Hongye and Betz, Johannes}, booktitle={2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)}, title={A Learning-Based Planning and Control Framework for Inertia Drift Vehicles}, year={2025}, pages={2289-2294}, doi={10.1109/ITSC60802.2025.11423578} } -
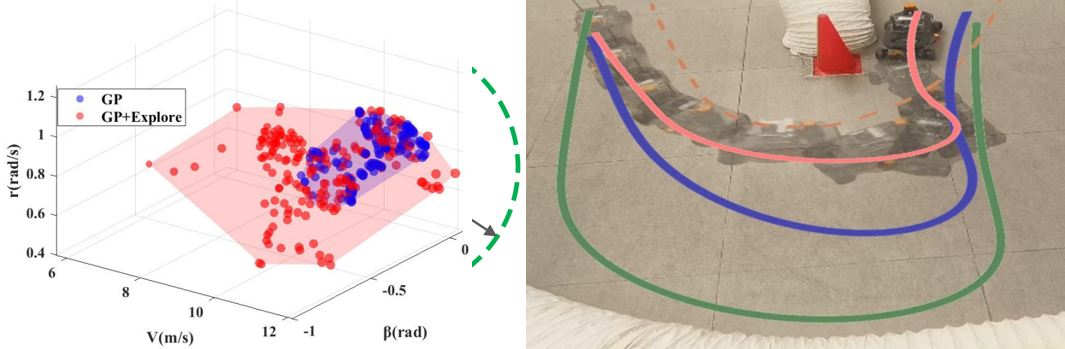
Learning to Race in Extreme Turning Scene with Active Exploration and Gaussian Process Regression-based MPC
Guoqiang Wu*, Cheng Hu*, Wangjia Weng, Zhouheng Li, Yonghao Fu, Lei Xie, Hongye Su
Wu G, Hu C, Weng W, et al. Learning to Race in Extreme Turning Scene with Active Exploration and Gaussian Process Regression-based MPC[J]. arXiv preprint arXiv:2410.05740, 2024.@INPROCEEDINGS{11097693, author={Wu, Guoqiang and Hu, Cheng and Weng, Wangjia and Li, Zhouheng and Fu, Yonghao and Xie, Lei and Su, Hongye}, booktitle={2025 IEEE Intelligent Vehicles Symposium (IV)}, title={Learning to Drift in Extreme Turning with Active Exploration and Gaussian Process Based MPC}, year={2025}, pages={1681-1688}, doi={10.1109/IV64158.2025.11097693} }

🏁 Competitions
- 4th place in 18TH Roboracer autonomous grand prix by IV 2024
2024 IEEE Intelligent Vehicles Symposium (IV 2024), June 3rd - 5th 2024, Jeju Shinhwa World, Jeju Island, Korea
Zhouheng Li, Cheng Hu, Bei Zhou, Yonghao Fu, Guoqiang Wu, Yangyang Xie
💡 Services
- The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’ 26).
- IEEE International Conference on Robotics and Automation (ICRA’ 26).
- Robotics and Autonomous Systems.
- IEEE Robotics and Automation Letters.
🤗 So Glad You're Here!
I truly appreciate everyone who takes the time to visit my homepage :)